Process Methodology we used and future plans
Overview
Cyprus 3D reptiles aims to develop accurate animated 3D models of Cyprus reptiles through digitalizing and preserving part of our natural heritage. The projects aims to preserves not only tangible aspect of the Reptilia on the island, like shape, colour, dimensions, postures, but also the intangible aspects of this heritage through recording animals movements, gestures and signals. The outcomes of the project will highly support research and conservation of wild fauna, providing in the same time state-of-art educational materials and tools to be used in classrooms and museums.
Scanning
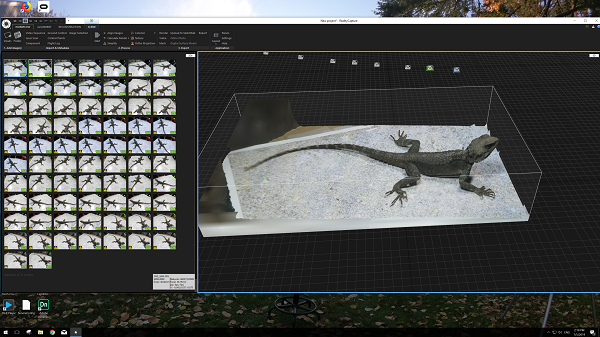
The reptiles were 3D scanned using Beastcam © technology. This procedure includes taking multiple photos of the live animals at varying angles using a rotating grit bearing photo cameras. This technology provides researchers with the opportunity to capture within a time window of a few seconds more than 100 pictures of a stationary live animal. The set of photos were processed via COLMAP, a general-purpose, end-to-end image-based 3D reconstruction software package, resulting in a 3D point cloud of the scanned animal. The point cloud was then converted into polygon meshes using Poisson Surface Reconstruction, via MeshLab.

Rigging, Skinning and Texturing
The 2D texture files of the scanned animals were developed in MeshLab, using photos of the known camera positions. The colour texture map was applied to the virtual model using Blender. Missing mesh and texture information were filled in using COLMAP and Meshroom using the photos as reference. The development of a control rig (internal skeleton) for each animal was conducted using Blender allowing for the mesh (3d model of the animal) to be deformed and animated.
Data acquisition
In order to motion capture our subjects, we conducted in two wooden enclosures (2.5m x 3m for the snake in the facilities of the Graphics Virtual Reality Lab, University of Cyprus and 1.5m x 1.5m for the lizard in the facilities of Terrestrial Ecosystem Management Lab, Open University of Cyprus). The purpose of building these enclosures was to prevent escape, while simultaneously allowing the free and unobstructed movement of the reptiles in the available space. The enclosures were open from above to allow a direct view of the animals’ movement by a set of cameras surrounding the enclosure. For the acquisition of accurate and highly detailed information on animal motion, we combined three different methods using numerus recording devices.


A. Optical motion Capture
Aim to achieve high precision motion acquisition allowing the creation of high quality visual 3D patterns of our animal movements.
A passive motion capture system of twelve Optitrack Flex 3 cameras (resolution of 640x480) was used to capture the 3D motion of articulated subjects. The cameras operate at high frequency (in our experiments, we capture movements at 100Hz), each of which can capture the position of any number of bright spots from the reflective markers. For the lizard, we used a total of 17 facial markers (3 mm diameter), while for the snake we used 12 medium-sized markers ( 14 mm diameter). The animals were released in the developed enclosure setup and moved freely. The position of the markers in 3D space was estimated using triangulation, assuming that at least three cameras have direct view of their reflected light. The markers are tracked over time in high frequency, and used to reconstruct a complete three-dimensional pose of the reptile’s body.
B. RGB Vision records
Aim to assist with the visual identification of behaviour
One top view, two fixed site views and one movable hand camera, recording at 24-30 fps (resolution of 1920×1080), were used as to provide an overview of the animals’ motion, allowing researchers to identify, label, and categorize their movements.
C. Accelerometers
Aim to acquiring acceleration signatures for further analysis of the recorded behaviours
The AXY-4 triaxial accelerometers of Technosmat, weighing no more than 3g, were used to record and analyse acceleration produced by the animals’ movements. Accelerometers were glued in the dorsal area near the neck of the two species using non epoxy glue. The position of placement was carefully selected as to allow the device to record even the smallest body movement minimizing at the same time the discomfort of the animal allowing an unobstructed behaviour. Accelerometers were configured to a sample rate of 100 Hz, sensitivity of 2g and a resolution of 8 bits. Prior to attachment to the animals, accelerometers were calibrated to the three-axis.

Cleaning – Labelling
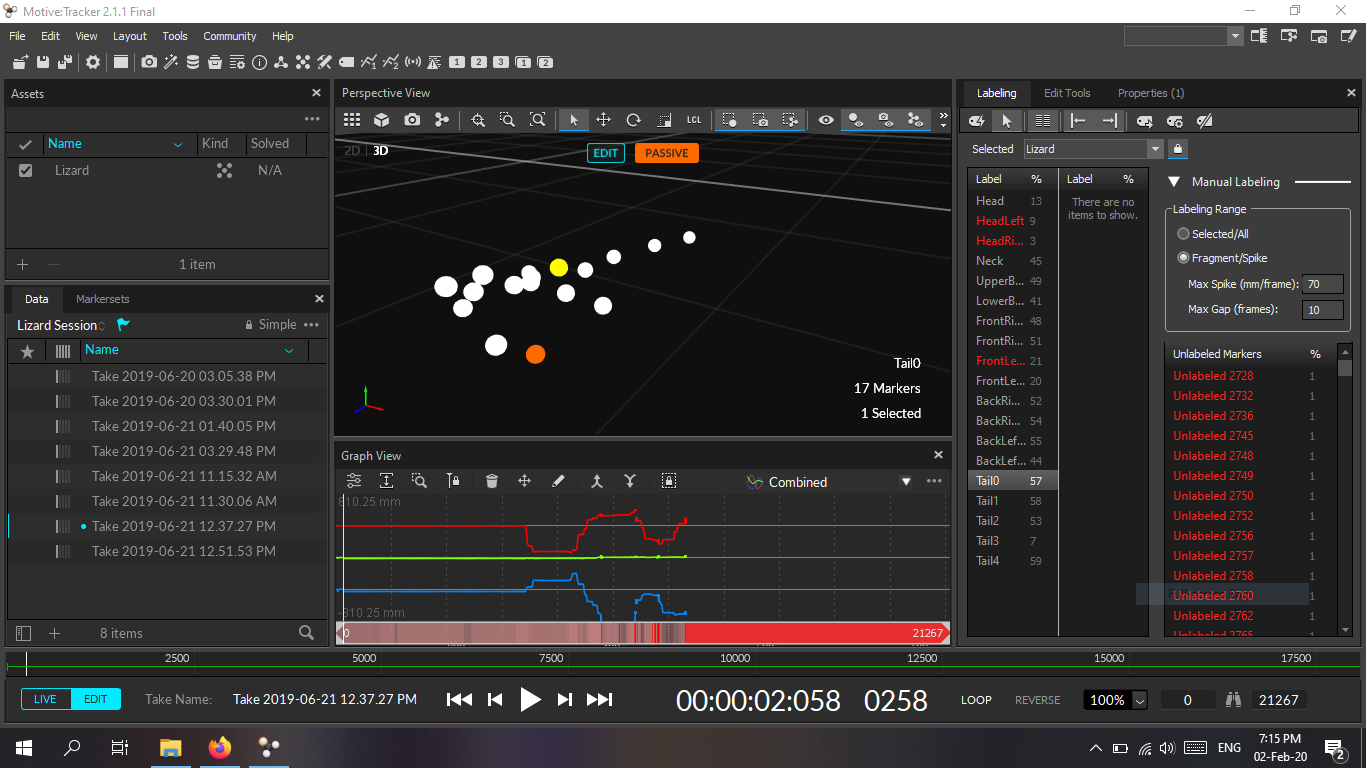
Motion capture records were processed using the Optitrack Motive software. We labelled the markers, cleaned-up the motion data, and filled in missing information to ensure tracking accuracy. The labelled markers were thereafter exported in .c3d format so as to be imported to Autodesk MotionBuilder.
Animation - Visualization
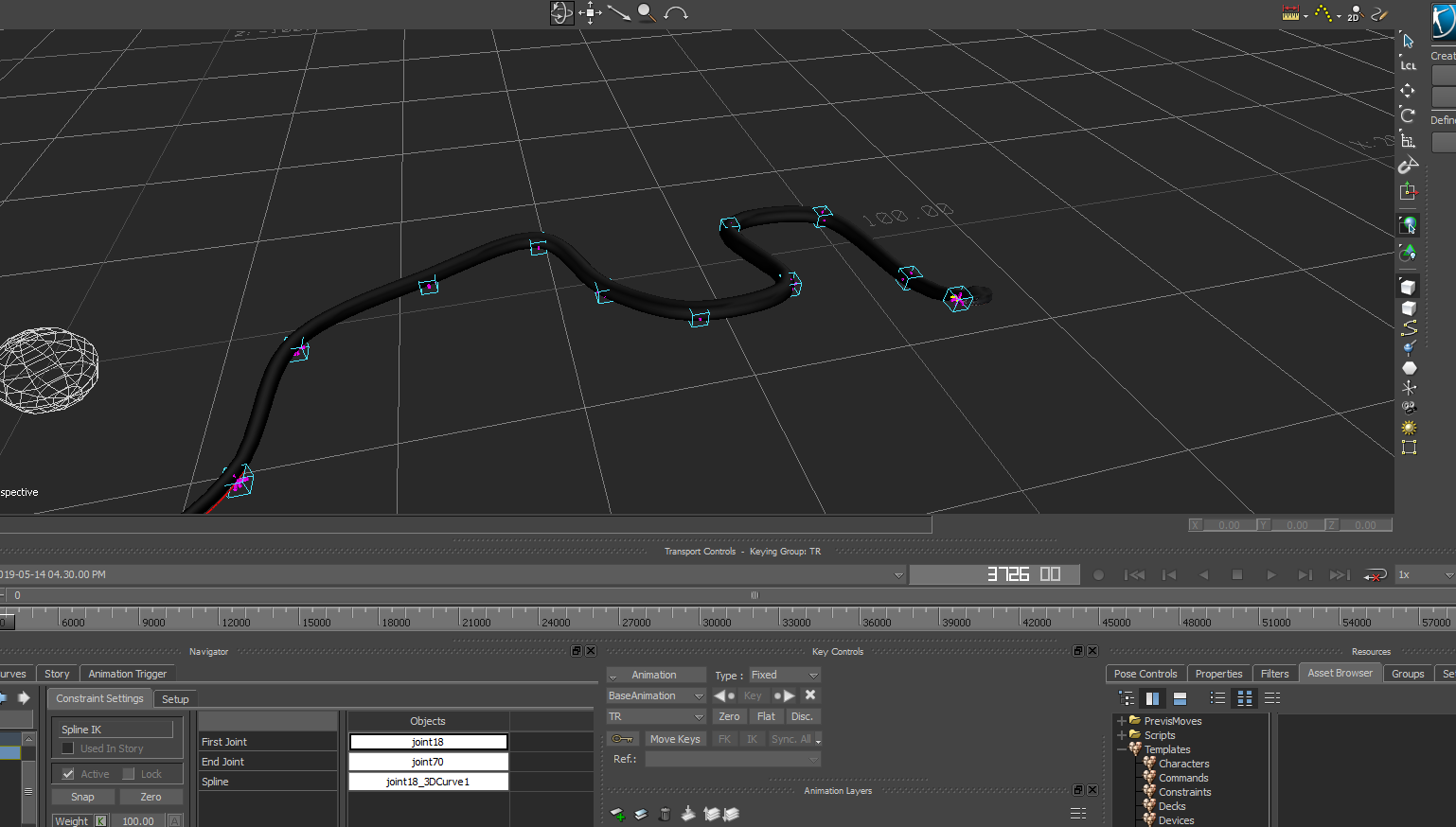
The cleaned .c3d files were matched to the corresponding 3D reptile’s model, and each marker (from the .c3d file) was assigned to a specific joint of the 3D model. More specifically, markers were used as parents of the using a spline IK to drive the animation. Such a configuration has enabled baking the animation on the rig of the reptile’s model, and exporting the animated model in .fbx format.
Website template by Themefisher.com
Developed by Michael Konstantinou